
Abstract
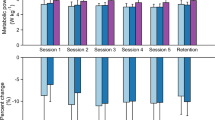
Above-knee amputation severely reduces the mobility and quality of life of millions of individuals. Walking with available leg prostheses is highly inefficient, and poor walking economy is a major problem limiting mobility. Here we show that an autonomous powered hip exoskeleton assisting the residual limb significantly improves metabolic walking economy by 15.6 ± 2.9% (mean ± s.e.m.; two-tailed paired t-test, P = 0.002) in six individuals with above-knee amputation walking on a treadmill. The observed metabolic cost improvement is equivalent to removing a 12-kg backpack from a nonamputee individual. All participants were able to walk overground with the exoskeleton, including starting and stopping, without notable changes in gait balance or stability. This study shows that assistance of the user’s residual limb with a powered hip exoskeleton is a viable solution for improving amputee walking economy. By significantly reducing the metabolic cost of walking, the proposed hip exoskeleton may have a considerable positive impact on mobility, improving the quality of life of individuals with above-knee amputations.
This is a preview of subscription content, access via your institution
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
$29.99 / 30 days
cancel any time
Subscribe to this journal
Receive 12 print issues and online access
$209.00 per year
only $17.42 per issue
Buy this article
- Purchase on Springer Link
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout




Similar content being viewed by others


Data availability
All data are freely available in an open repository19.
Code availability
Code is freely available upon written request to the corresponding author.
References
Boulton, A. J., Vileikyte, L., Ragnarson-Tennvall, G. & Apelqvist, J. The global burden of diabetic foot disease. Lancet 366, 1719–1724 (2005).
Goldfarb, M. Consideration of powered prosthetic components as they relate to microprocessor knee systems. J. Prosthet. Orthot. 25, P65–P75 (2013).
Seroussi, R. E., Gitter, A., Czerniecki, J. M. & Weaver, K. Mechanical work adaptations of above-knee amputee ambulation. Arch. Phys. Med. Rehabil. 77, 1209–1214 (1996).
Schmalz, T., Blumentritt, S. & Jarasch, R. Energy expenditure and biomechanical characteristics of lower limb amputee gait: the influence of prosthetic alignment and different prosthetic components. Gait Posture 16, 255–263 (2002).
Waters, R. L. et al. Energy cost of walking of amputees: the influence of level of amputaton. J. Bone Jt. Surg. Am. 58, 42–46 (1976).
Pell, J. P., Donnan, P. T., Fowkes, F. G. & Ruckley, C. V. Quality of life following lower limb amputation for peripheral arterial disease. Eur. J. Vasc. Surg. 7, 448–451 (1993).
Wurdeman, S. R., Stevens, P. M. & Campbell, J. H. Mobility Analysis of AmpuTees (MAAT I): quality of life and satisfaction are strongly related to mobility for patients with a lower limb prosthesis. Prosthet. Orthot. Int. 42, 498–503 (2018).
Sasaki, K., Neptune, R. R. & Kautz, S. A. The relationships between muscle, external, internal and joint mechanical work during normal walking. J. Exp. Biol. 212, 738–744 (2009).
Farris, D. J. & Sawicki, G. S. The mechanics and energetics of human walking and running: a joint level perspective. J. R. Soc. Interface 9, 110–118 (2012).
Goldfarb, M., Lawson, B. E. & Shultz, A. H. Realizing the promise of robotic leg prostheses. Sci. Transl. Med. 5, 210ps15 (2013).
Browning, R. C., Modica, J. R., Kram, R. & Goswami, A. The effects of adding mass to the legs on the energetics and biomechanics of walking. Med. Sci. Sports Exerc. 39, 515–525 (2007).
Alimusaj, M., Fradet, L., Braatz, F., Gerner, H. J. & Wolf, S. I. Kinematics and kinetics with an adaptive ankle foot system during stair ambulation of transtibial amputees. Gait Posture 30, 356–363 (2009).
Tran, M., Gabert, L., Cempini, M. & Lenzi, T. A lightweight, efficient fully powered knee prosthesis with actively variable transmission. IEEE Robot. Autom. Lett. 4, 1186–1193 (2019).
Gabert, L., Hood, S., Tran, M., Cempini, M. & Lenzi, T. A compact, lightweight robotic ankle–foot prosthesis: featuring a powered polycentric design. IEEE Robot. Autom. Mag. 27, 87–102 (2020).
Seo, K., Lee, J., Lee, Y., Ha, T. & Shim, Y. Fully autonomous hip exoskeleton saves metabolic cost of walking. in 2016 IEEE International Conference on Robotics and Automation (ICRA) 4628–4635 (IEEE, 2016).
Kim, J. et al. Reducing the metabolic rate of walking and running with a versatile, portable exosuit. Science 365, 668–672 (2019).
Martini, E. et al. Lower-limb amputees can reduce the energy cost of walking when assisted by an Active Pelvis Orthosis. in 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob) 809–815 (IEEE, 2020); https://doi.org/10.1109/BioRob49111.2020.9224417
Ishmael, M. K., Tran, M. & Lenzi, T. ExoProsthetics: assisting above-knee amputees with a lightweight powered hip exoskeleton. in 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR) 925–930 (IEEE, 2019).
Ishmael, M. K., Archangeli, D. & Lenzi, T. Powered hip exoskeleton improves walking economy in individuals with above-knee amputation. figshare https://doi.org/10.6084/m9.figshare.15180711 (2021).
Murphy, E. Hans Adolph Mauch. in Memorial Tributes 3, 259–265 (National Academy of Engineering, 1989).
Johansson, J. L., Sherrill, D. M., Riley, P. O., Bonato, P. & Herr, H. P. A clinical comparison of variable-damping and mechanically passive prosthesis knee devices. Am. J. Phys. Med. Rehabil. 84, 563–575 (2005).
Schmalz, T., Blumentritt, S. & Jarasch, R. Energy expenditure and biomechanical characteristics of lower limb amputee gait. Gait Posture 16, 255–263 (2002).
Sawicki, G. S., Beck, O. N., Kang, I. & Young, A. J. The exoskeleton expansion: improving walking and running economy. J. Neuroeng. Rehabil. https://doi.org/10.1186/s12984-020-00663-9 (2020).
Zhang, J. et al. Human-in-the-loop optimization of exoskeleton assistance during walking. Science 356, 1280–1283 (2017).
Ding, Y., Kim, M., Kuindersma, S. & Walsh, C. J. Human-in-the-loop optimization of hip assistance with a soft exosuit during walking. Sci. Robot. 3, eaar5438 (2018).
Welker, C. G., Voloshina, A. S., Chiu, V. L. & Collins, S. H. Shortcomings of human-in-the-loop optimization of an ankle–foot prosthesis emulator: a case series. R. Soc. Open Sci. 8, rsos.202020 (2021).
Petrini, F. M. et al. Sensory feedback restoration in leg amputees improves walking speed, metabolic cost and phantom pain. Nat. Med. 25, 1356–1363 (2019).
Khemka, A., Frossard, L., Lord, S. J., Bosley, B. & Al Muderis, M. Osseointegrated total knee replacement connected to a lower limb prosthesis: 4 cases. Acta Orthop. 86, 740–744 (2015).
Kuiken, T. A., Fey, N. P., Reissman, T., Finucane, S. B. & Dumanian, G. A. Innovative use of thighplasty to improve prosthesis fit and function in a transfemoral amputee. Plast. Reconstr. Surg. Glob. Open 6, e1632 (2018).
Quinlivan, B. T. et al. Assistance magnitude versus metabolic cost reductions for a tethered multiarticular soft exosuit. Sci. Robot. 2, eaah4416 (2017).
Hafner, B. J. & Smith, D. G. Differences in function and safety between Medicare Functional Classification Level-2 and -3 transfemoral amputees and influence of prosthetic knee joint control. J. Rehabil. Res. Dev. 46, 417–434 (2009).
Gailey, R. S. et al. The Amputee Mobility Predictor: an instrument to assess determinants of the lower-limb amputee’s ability to ambulate. Arch. Phys. Med. Rehabil. 83, 613–627 (2002).
Riley, P. O., Paolini, G., Della Croce, U., Paylo, K. W. & Kerrigan, D. C. A kinematic and kinetic comparison of overground and treadmill walking in healthy subjects. Gait Posture 26, 17–24 (2007).
Zhang, J.-T., Novak, A. C., Brouwer, B. & Li, Q. Concurrent validation of Xsens MVN measurement of lower limb joint angular kinematics. Physiol. Meas. 34, N63–N69 (2013).
Guidetti, L. et al. Validity, reliability and minimum detectable change of COSMED K5 portable gas exchange system in breath-by-breath mode. PLoS ONE 13, e0209925 (2018).
Sawicki, G. S., Beck, O. N., Kang, I. & Young, A. J. The exoskeleton expansion: improving walking and running economy. J. Neuroeng. Rehabil. 17, 25 (2020).
Hood, S., Ishmael, M. K., Gunnell, A., Foreman, K. B. & Lenzi, T. A kinematic and kinetic dataset of 18 above-knee amputees walking at various speeds. Sci. Data 7, 150 (2020).
Collins, S. H., Wiggin, M. B. & Sawicki, G. S. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 522, 212–215 (2015).
Galle, S., Malcolm, P., Derave, W. & De Clercq, D. Adaptation to walking with an exoskeleton that assists ankle extension. Gait Posture 38, 495–499 (2013).
Reinkensmeyer, D., Wynne, J. H. & Harkema, S. J. A robotic tool for studying locomotor adaptation and rehabilitation. in Proceedings of the Second Joint 24th Annual Conference and the Annual Fall Meeting of the Biomedical Engineering Society 3, 2353–2354 (Engineering in Medicine and Biology, 2002); https://doi.org/10.1109/IEMBS.2002.1053318
Sarkisian, S. V., Ishmael, M. K., Hunt, G. R. & Lenzi, T. Design, development, and validation of a self-aligning mechanism for high-torque powered knee exoskeletons. IEEE Trans. Med. Robot. Bionics 2, 248–259 (2020).
Sarkisian, S. V., Ishmael, M. K. & Lenzi, T. Self-aligning mechanism improves comfort and performance with a powered knee exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 29, 629–640 (2021).
Ronsse, R. et al. Human–robot synchrony: flexible assistance using adaptive oscillators. IEEE Trans. Biomed. Eng. 58, 1001–1012 (2011).
Lenzi, T., Carrozza, M. C. & Agrawal, S. K. Powered hip exoskeletons can reduce the user’s hip and ankle muscle activations during walking. IEEE Trans. Neural Syst. Rehabil. Eng. 21, 938–948 (2013).
Ronsse, R. et al. Real-time estimate of velocity and acceleration of quasi-periodic signals using adaptive oscillators. IEEE Trans. Robot. 29, 783–791 (2013).
Acknowledgements
We wish to acknowledge the contribution of all study participants. We would like to thank M. Tran, S. Sarkisian and C. Buchanan for their help with the development of the powered hip exoskeleton and related interfaces. We would like to thank J. Mendez for assistance in collection and processing of all data from participants and G. Hunt for help proofreading the manuscript. We would also like to thank C. Hansen and C. Duncan for their help with participant recruitment. Funding for this study was provided by the Congressionally Directed Medical Research Program of the Department of Defense under grant number W81XWH-16-1-0701 awarded to T.L. and by the National Science Foundation under grant number 2046287 awarded to T.L.
Author information
Authors and Affiliations
Contributions
T.L. directed the project. T.L. and M.K.I. invented the controller and implemented it on the powered hip exoskeleton. M.K.I., D.A. and T.L. conducted the experiments with human participants. M.K.I. and D.A. analyzed the data. All authors contributed to manuscript preparation.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Peer review information Nature Medicine thanks Gregory Sawicki and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. Michael Basson was the primary editor on this article and managed its editorial process and peer review in collaboration with the rest of the editorial team.
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Supplementary Information
Supplementary Tables 1–4.
Supplementary Video 1
Side-by-side comparison of all participants walking on a treadmill with and without the exoskeleton.
Supplementary Video 2
Side-by-side comparison of all participants walking overground with and without the exoskeleton.
Supplementary Video 3
One participant dons and doffs the exoskeleton.
Rights and permissions
About this article

Cite this article
Ishmael, M.K., Archangeli, D. & Lenzi, T. Powered hip exoskeleton improves walking economy in individuals with above-knee amputation. Nat Med 27, 1783–1788 (2021). https://doi.org/10.1038/s41591-021-01515-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/s41591-021-01515-2
This article is cited by
-
Powered single hip joint exoskeletons for gait rehabilitation: a systematic review and Meta-analysis
BMC Musculoskeletal Disorders (2024)
-
Forward dynamics simulation of a simplified neuromuscular-skeletal-exoskeletal model based on the CMA-ES optimization algorithm: framework and case studies
Multibody System Dynamics (2024)
-
After scaling to body size hip strength of the residual limb exceeds that of the intact limb among unilateral lower limb prosthesis users
Journal of NeuroEngineering and Rehabilitation (2023)
-
Cognitive benefits of using non-invasive compared to implantable neural feedback
Scientific Reports (2022)
-
Empowering prosthesis users with a hip exoskeleton
Nature Medicine (2021)
